Robotik hızla gelişiyor ve daha hassas, verimli hareket kontrolüne ihtiyaç duyuyor. Step motorlar yardımcı oluyor, ancak standart tipler genellikle yetersiz kalıyor. Özel statorlar ve rotorlar, belirli robotik ihtiyaçları karşılamak için artık çok önemli.
Robotikte Özel Step Motorların Önemi
Standart Step Motorların Sınırlamaları
Standart step motorlar, elektromekanik tasarımda “her şeye uyan tek boyut” yaklaşımını yansıtır. Belirli boyutlarda (örneğin, NEMA 17, 23, 34), sabit sargı konfigürasyonlarında ve tipik adım açılarında (1,8°, 0,72°) mevcut olan bu motorlar, genel amaçlı hareket kontrolü için oldukça uygundur. Bununla birlikte, robotik, bir dizi incelikli zorluk sunmaktadır:
- Yüksek Torklu Kompaktlık:Mafsallı kollar, tutucular veya kamera gimbal’leri gibi robotik alt montaj parçaları, fiziksel olarak küçük ancak yüksek tork sağlayabilen motorlara ihtiyaç duyar. Hazır çözümler genellikle bu özelliklerden birini diğeriyle takas eder.
- Düşük Dalgalanmalı Tork:Mikro titreşim olmadan düzgün hareket, mikroskobik manipülasyon veya optik platformlar gibi uygulamalar için kritik öneme sahiptir. Özel kutup tasarımları, kilitleme torkunu ve tork dalgalanmasını en aza indirebilir.
- Yabancı Ortama Tolerans:Robotik sıklıkla aşırı koşullara girer; bunlar arasında yüksek titreşimli endüstriyel ortamlar, sterilize edilebilir tıbbi ortamlar veya aşırı sıcaklıklar yer alır. Standart motorların bu koşullarla başa çıkabilmesi için stator kaplamalarının, rotor mıknatıslarının ve yatak aksamlarının yeniden tasarlanması gerekebilir.
- Çok Fazlı Konfigürasyonlar:Bazı yüksek performanslı görevler, standart iki veya üç aşamadan daha fazlasından fayda sağlar; bu da daha hassas kontrol, daha akıcı hareket ve yedeklilik imkanı sunar.
Özel Çözümler: Performans Artışını Artırmak
Kişiye Özel step motor stator ve rotorMontajlar önemli kazanımların önünü açıyor:
- Optimize Edilmiş Elektromanyetik Topoloji:Mühendisler, kutup sayısını, eğim açılarını, sarım desenlerini ve yuva geometrisini ayarlayarak, robotik sisteme özel olarak uyarlanmış hassas tork-sarım başına değer, tork dalgalanması özellikleri ve verimlilik elde ederler.
- Motor Minyatürleştirme:Gelişmiş rotor-stator tasarımları (ince profilli lamine demir çekirdekler veya yapıştırılmış alaşımlar gibi), daha küçük boyutlarda yüksek tork yoğunluklarına olanak tanır.
- Çevresel Özelleştirme:Özel kaplamalar, örneğin konformal stator verniği, epoksi kapsülleme ve rotor mıknatıs korozyon önleyici kaplama, neme, toza, ısıya veya kimyasallara karşı simya düzeyinde tolerans sağlar.
- Entegre Algılama Çözümleri:Hall etkisi sensörlerinin, manyetik kodlayıcıların veya sıcaklık sensörlerinin doğrudan stator veya rotor aksamlarına entegre edilmesi, kusursuz sistem entegrasyonu ve gelişmiş geri besleme kontrolü sağlar.
Özel Stator ve Rotorların Temel Tasarım Unsurları
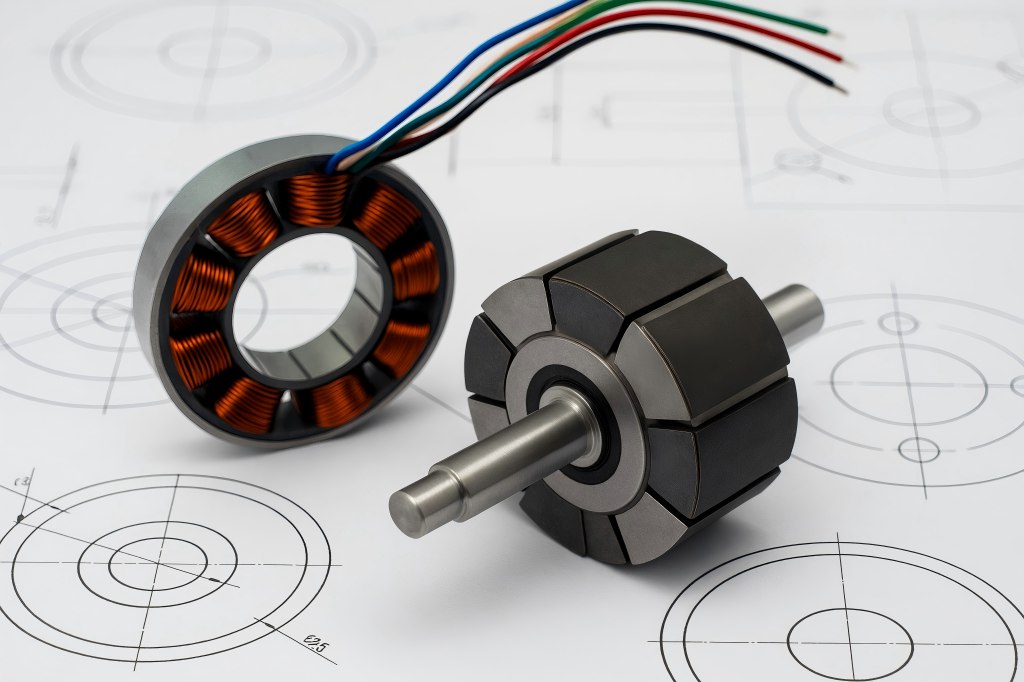
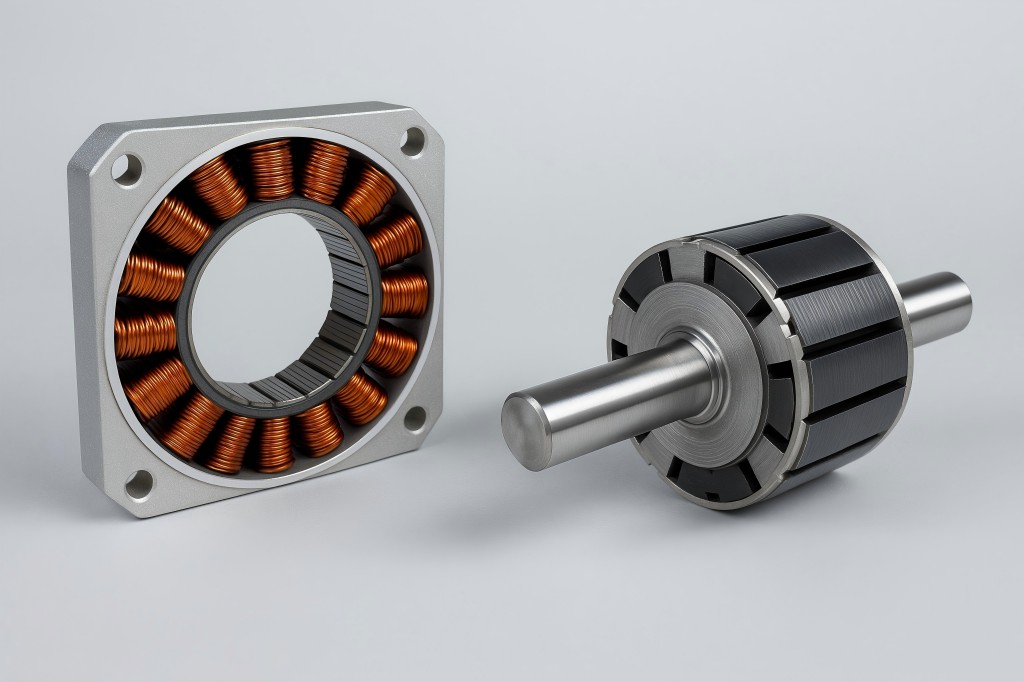
Stator Mimarisi ve Sargı Şemaları
Stator, sabit güç kaynağıdır: dönen manyetik alanlar üretmek üzere sarılmış bobinlere sahip lamine edilmiş bir demir çekirdektir. Özel tasarımda dikkate alınması gereken başlıca hususlar şunlardır:
- Laminasyon Panel Tasarımı:Mühendisler, adım açısını kontrol etmek için yuva/kutup kombinasyonlarını seçerler (örneğin, kutup sayısını değiştirerek 1,8°’den 0,45°’ye geçmek). Eğik laminasyonlar tork dalgalanmasını azaltır ancak üretim karmaşıklığını artırır. Özel laminasyon profilleri ayrıca içi boş şaft tasarımları veya kompakt çerçeve profilleri için iç statorlara olanak tanır.
- Sarmal Topoloji:Standart seri veya paralel bipolar sargılar, çok katmanlı veya üst üste bindirilmiş sargı mimarilerine yerini bırakabilir. Epoksi reçine dolgulu ince telli mıknatıs teli (örneğin, 28–32 AWG), minyatürleştirmeye yardımcı olarak termal performansı korurken çoklu dönüşlere olanak tanır.
- Yalıtım ve Isı Yönetimi:Özel yalıtım malzemeleri (H veya C sınıfı vernikler) sıcaklık toleransını artırır. Bazı statorlar, yüksek güçlü uygulamalarda ısıyı aktif olarak dağıtmak için iletken soğutma yolları veya buhar kanalı devreleri entegre eder.
- Sensör Entegrasyonu:Stator çekirdeğinin içine hassas açısal konumlara Hall sensörleri yerleştirilmesi, harici bağlantı elemanlarına gerek kalmadan kapalı devre kontrolü sağlar. Ayrıca, mikro adım altı kontrol için manyetik enkoderler de eklenebilir.
Rotor Konfigürasyonları
Kalıcı mıknatısları veya değişken relüktans kutuplarını barındıran rotor, hassas ve tork optimizasyonlu hareket sağlamak için stator tasarımını tamamlamalıdır. Dikkate alınması gereken hususlar şunlardır:
- Mıknatıs Kalitesi:Nadir toprak mıknatısları (tipik olarak N45–N52 NdFeB), minyatür boyutlarda yüksek enerji yoğunluğu sunar. Özel mıknatıslar, akı dağılımını kontrol etmek ve dişli torkunu azaltmak için özel konfigürasyonlarda bölümlere ayrılabilir, eğimli hale getirilebilir veya birbirine bağlanabilir.
- Rotor Çekirdeği Tasarımı:Lamine iç rotorlar düşük ataleti ve verimli akı yollarını desteklerken, ağır demir oluklu rotorlar yüksek yük senaryolarında atalet stabilitesini artırır. Hibrit tasarımlar, hedeflenen kullanım durumları için her ikisini de birleştirir.
- Termal Davranış:Yüksek sıcaklıklarda rotor mıknatısının performansı düşer. Özel olarak tasarlanmış radyal havalandırmalı rotorlar, geliştirilmiş kaplamalar veya dahili termistörler bu etkiyi azaltabilir.
- Mekanik Özellikler:Stabilite kritik önem taşıdığında (örneğin cerrahi robotlar veya mikro keşif dronları), rotor dinamik dengelemesi bir gereklilik haline gelir. Özel karşı ağırlık özellikleri ve eşleşen şaft tasarımları, sıkı titreşim özelliklerini (10 µm’nin altında artık dengesizlik) karşılayacak şekilde tasarlanmıştır.
Üretim Teknikleri ve Yenilikler
Gelişmiş Damgalama ve Laminasyon
Laminasyonların hassas bir şekilde damgalanması en yaygın yöntemdir.stator çekirdekleriÖzel profiller ve özel yarık laminasyonlar, tork dalgalanmasını azaltmak için kutup başına 1° kadar düşük eğim açılarına olanak tanır. Kenar kalitesi, hava boşluğu eksantrikliğini en aza indiren < 5 µm boyutsal toleransla kontrol edilir. Yapıştırıcı laminasyon yoluyla üretilen alternatif yapıştırılmış çekirdekler, içi boş şaftlar için iç delikli kamalar gibi karmaşık çekirdek şekillerine olanak tanır.
Yüksek Hassasiyetli Sargı
Boyut sınırlarını zorlayan statorlar için özel olarak tasarlanmış otomatik mikro sarım platformları, 32 AWG veya daha ince tellerin, <1 N avans gerilim kontrolü ile çapraz veya çok katmanlı desenlerde sarılmasına olanak tanır. Reçine transfer kalıplama (RTM) veya vakumlu reçine emdirme yöntemleri, termal döngülere ve mekanik şoklara dayanıklı, boşluksuz sarım paketleri üretir.
Mıknatıs Taşıma ve Montajı
Rotor mıknatıs montajı, her bir mıknatıs segmentini doğru bir şekilde yönlendirmek için otomatik yerleştirme aletleri kullanılarak ISO 14644 sınıfı temiz odalarda gerçekleştirilir. Rotor bütünlüğünü sağlamak için yüksek sıcaklık ve mekanik gerilime dayanıklı (örneğin, 200 °C epoksi) sertifikalı yapıştırıcılar kullanılır. Daha sonraki statik ve dinamik dengeleme işlemleri ISO 1940 A1.5 standartlarına veya daha iyisine göre yapılır.
Kaplama ve Kalıp Üstü Kaplama
Zorlu ortamlar için statorlar, 0,5 mm kalınlığında vernik veya epoksi reçine ile kaplanır. Rotorlar korozyon direnci için nikel kaplı veya toz boyalı olabilir. Denizaltı, kimyasallara maruz kalan veya vakum uygulamalarında, TPU kapsülleme kullanılarak tamamen kalıplanmış motorlar, tam çevresel izolasyon sağlar.
Kontrol Elektroniği ve Entegrasyonu
Özel rotor-statorTasarımlar hikayenin sadece yarısı; yeteneklerinden tam olarak yararlanabilecek elektroniklerle eşleştirilmeleri gerekiyor:
Sürücü ve Amplifikatör Eşleştirme
Yüksek performanslı step motorlar, 256 veya 512 adım/devir’e kadar mikro adımlama yapabilen akım modlu bipolar sürücülere ihtiyaç duyabilir. Yüksek voltajlı senaryolarda, 100 kHz’e kadar frekanslarda düzgün akım regülasyonu için doğrusal sürücüler tercih edilir. Bazı sistemler, sürücü devresini doğrudan motor gövdesine entegre ederek kablolamayı ve elektromanyetik girişimi en aza indirirken gelişmiş akım geri besleme döngülerine olanak tanır.
Geri Besleme Mekanizmaları
Stator içine Hall sensörleri veya enkoderler entegre etmek, kapalı döngü kontrolü sağlayarak step motoru bir servo hibritine dönüştürür. Bu, atlanan adımları tespit etme, yük altında pozisyonu koruma ve rezonansı ortadan kaldırma yeteneğiyle sonuçlanır. Özel yazılım ve kontrol algoritmaları (örneğin LQG veya H∞), performansı, adaptif akım ayarını ve rezonans önleme stratejilerini optimize eder.
İletişim ve Bağlantı
Dağıtılmış robotik sistemlerde, motorlar endüstriyel alan veri yolları (EtherCAT, CANopen, SERCOS) veya kablosuz protokoller (örneğin, Wi-Fi 6, BLE 5.2) aracılığıyla bağlanır. Özel motor elektroniği, döngüsel yedeklilik kontrolleri, çalışır durumdayken değiştirme özelliği ve yerinde teşhis gibi dayanıklılık özelliklerini destekler. Bakım süreçlerinin erkene alınması – ürün yazılımı güncellemeleri ve çalışma zamanı izleme kayıtları, OEM filolarında öngörücü bakımı mümkün kılar.
Uygulama Örnekleri
Özel stator-rotor mühendisliğinin etkisini göstermek için, robotik alanındaki çeşitli gerçek dünya uygulamalarına dair birkaç örnek aşağıda verilmiştir.
Hassas Tıbbi Robotik – Mikro Cerrahi Manipülatör
Göz cerrahisi için aletler geliştiren bir tıbbi robotik firması, standart NEMA 8 motorlarıyla ilgili sınırlamalarla karşılaştı: Bu motorlar çok kaba ve vücut sıcaklığındaki ortamlarda (37 °C) termal olarak kararsızdı. Şirket, aşağıdaki çözümü geliştirmek için bir mekatronik tedarikçisiyle ortaklık kurdu:
- Ultra düşük tork dalgalanması için kutup başına 0,8° açıyla eğimli dişlerle lamine edilmiş 48 kutuplu stator.
- Stator deliği içine yerleştirilmiş termistör ve mikro-kodlayıcı
- Ultra ince yapıştırılmış NdFeB mıknatıslara, yüksek termal kararlılığa ve < 2 µm dinamik dengeleme özelliğine sahip bir rotor.
- Kriyojenik olarak derecelendirilmiş vernik kaplamalar
Elde edilen performans: 0,0075° mikro adım çözünürlüğü, 0,5 µm’ye kadar sıfır algılanabilir titreşim ve 60 dakikalık kesintisiz çalışma sırasında termal kaçak önleme.
Endüstriyel Robotik – Yüksek Hızlı Alma ve Yerleştirme
Elektronik montaj tesisinde, minimum arıza süresiyle saatte 45.000 adet parça alımı kapasitesinde, 5 milisaniyenin altında adım geçişleri ve hassas yerleştirme gerekiyordu. Bu amaçla özel bir motor geliştirildi ve bu motorun özellikleri şunlardı:
- Hassas mikro adımlama sağlayan altı fazlı bir stator
- İçten havalandırmalı rotor, cebri hava soğutması için optimize edilmiştir.
- Eğik kutuplar aracılığıyla yüzey işlenmiş kilitleme telafisi
Bu sayede 200 kHz PWM frekansında kapalı devre çalışma mümkün oldu ve 0,12° adım çözünürlüğü, yavaşlamada enerji geri kazanımı ve hat başına aylık toplam 3,6 saatlik arıza süresi azalması sağlandı.
Uzay Robotikleri – Ay Aracı Hareket Sistemi
Ay yüzeyine (–180 °C ila +120 °C arasındaki sıcaklık değişimleri) gönderilecek keşif amaçlı robotların eklemlerini tasarlayan bir uzay robotik yüklenicisi, termal şoka ve vakum gaz çıkışına dayanabilecek motorlara ihtiyaç duyuyordu. Ortaya çıkan özel çözüm şu özellikleri içeriyordu:
- Vakum uyumlu yapıştırılmış laminasyonlar ve kapton yalıtımlı sargılar kullanan bir iç stator.
- Epoksi kaplı rotor, radyasyona dayanıklı nadir toprak mıknatısları ve Cerakote karasal kaplama ile donatılmıştır.
- ISO 6070 radyasyon seviyelerine göre derecelendirilmiş çift yedekli Hall sensörleri
- Tamamen dengeli rotor (< 0,1 g·mm artık dengesizlik)
Bu motorlar, birleşik termal-vakum çevrim testini (Mil-Std-810) başarıyla geçti ve performans düşüşü olmaksızın ±5°C/s sıcaklık artış hızlarında ≥2 milyon çevrim boyunca çalışabildiğini gösterdi.
İşletme Hususları ve Piyasa Trendleri
Maliyet ve Performans Arasındaki Denge
Özel stator-rotor motorları, kalıp, malzeme, hassas üretim ve test gereksinimleri nedeniyle standart hazır modellere göre 2-5 kat daha pahalı olabilir. Bununla birlikte, performans kazanımları daha yüksek verimlilik, daha kısa montaj süresi veya yeni iş fırsatları (örneğin, tıp veya uzay sektöründe) sağladığında, yatırım getirisi (ROI) cazip hale gelir.
Tedarik Zinciri ve Teslim Süreleri
Özel laminasyon kalıpları, sarım makineleri ve mıknatıs işleme işlemleri 8-16 haftalık teslim süreleri gerektirir. Stratejik stok planlaması veya modüler platform stratejileri (standart stator stoklarını özel sarımlar veya rotorlarla eşleştirmek), üreticilerin uzun teslim sürelerini ve stok maliyetlerini azaltmasına yardımcı olur.
Mevzuat ve Standartlara Uygunluk
Tıbbi robotik alanında IEC 60601 standardı zorunludur, uzay görevlerinde NASA/ESA standartları (örneğin ECSS) kullanılır ve endüstriyel üretim hatlarında ISO 9001 ve UL derecelendirmeleri geçerlidir. Özel motorlarda UL onaylı bileşenler, biyouyumlu malzemeler veya düşük gaz salınımı yapan yapıştırıcılar gerekebilir. Kalite sistemleri, tasarımdan sevkiyata kadar akredite edilmiş ve izlenebilir olmalıdır.
Yeni Trendler
Katmanlı Üretim: Metal 3D yazıcıyla üretilen stator çekirdekleri, entegre soğutma kanallarına sahip, topoloji açısından optimize edilmiş akı yolları sağlıyor; ancak şu anda maliyet ve sonradan tavlama ihtiyaçları nedeniyle darboğazda bulunuyor.
- Nadir Toprak Mıknatıslarına Alternatifler:NdFeB fiyatlarındaki dalgalanmalar nedeniyle, bazı tedarikçiler tork yoğunluğundan ödün vererek ancak termal dayanıklılık sunarak, yapıştırılmış ferrit veya AlNiCo destekleri deniyorlar.
- Akıllı Motorlar:IoT uyumlu mikrodenetleyiciler ve gerçek zamanlı ağ protokolleri üzerinden tahmine dayalı sağlık analitiği içeren motorlar, OEM’lerin garanti modellerinden performans odaklı hizmet modeline geçişine yardımcı oluyor.
Özel Motor Geliştirme için Mühendislik İş Akışı
Adım 1: Gereksinimlerin Belirlenmesi
Motorlar, bir diyalogla başlar: performans sınırları, çevresel kısıtlamalar, fiziksel sınırlar ve kullanım ömrünün sonu nedir? Temel değişkenler arasında tork eğrileri, adım çözünürlüğü, hacim/ağırlık kısıtlamaları, sıcaklık/nem/maruz kalma faktörleri, yaşam döngüsü döngüleri, gürültü ve düzenleyici standartlar yer alır.
Adım 2: Elektromanyetik Tasarım
Solaris veya Flux, laminasyon desenlerini, yuva/kutup sayılarını, eğimi ve sargı düzenini yinelemek için kullanılabilir. Mühendisler tork-hız ilişkisini, tutma torkunu, tork dalgalanmasını, çekirdek kayıplarını ve akı doygunluk seviyelerini simüle ederler.
3. Adım: Mekanik/Yapısal Tasarım
Rotor dengelemesi, gövde arayüzü, ısı dağıtım yolları ve mekanik koruma entegrasyonu SOLIDWORKS veya CATIA’da modellenmiştir. Bağlantı elemanı ön yüklemeleri, eksenel salınım, yatak seçimi ve radyal rijitlik analiz edilmiştir.
4. Adım: Prototip Oluşturma ve Test Etme
Genellikle 5-10 adetlik küçük bir prototip serisi üretilir ve mühendislik testlerine tabi tutulur: akı ölçümü, ID dişli kutusu arayüz kontrolleri, termal döngü, statik/dinamik dengeleme ve titreşim ve akustik gürültü spektrumu. Gerektiğinde, uygunluk testleri (tıbbi sızıntı testi, vakumlu fırınlama, EMI/EMC) gerçekleştirilir.
Adım 5: Yineleme ve Üretim
Performans eksiklikleri tasarım döngüsüne geri beslenir; örneğin, eğim ayarlaması, sarım dolum değişiklikleri veya kaplama modifikasyonları. Doğrulandıktan sonra, üretim kalıpları kesinleştirilir, tedarik zinciri kilitlenir ve sürekli kalite kontrol önlemleri (Cp/Cpk takibi, tork eğrisi parti kontrolleri) uygulanır.
Zorluklar ve Fırsatlar
Zorluklar
- Karmaşıklık ve Güvenilirlik:Daha özelleştirilmiş çözümler, eğimli laminasyonlar, ince sarım paketleri gibi daha fazla değişkeni beraberinde getirir ve bu da sıkı üretim kontrolü gerektirir.
- Ölçeklendirme Maliyetleri:Daha küçük üretim hacimlerinde (yüzlerce ila birkaç bin adet), kalıp amortismanı önemli hale gelir.
- Malzeme Bağımlılıkları:Demir alaşımları ve nadir toprak elementlerinin maliyetlerindeki dalgalanmalar, fiyatlandırma ve tasarım kararlarını etkiliyor.
- Tedarik Zinciri Dayanıklılığı:NdFeB mıknatıslar veya H sınıfı vernik gibi malzemeler için, gecikmeleri önlemek amacıyla yedekli tedarik sağlamak çok önemlidir.
Fırsatlar
Zorluk yaratan bu karmaşıklık aynı zamanda yenilik ufuklarını da açıyor:
- Yüksek Performanslı Niş Pazarlar:Tıbbi robotlar, cerrahi cihazlar, havacılık ve uzay sanayi, mikro montaj makineleri ve uzay robotları, motor başına elde edilen getirinin birim maliyetinden çok daha fazla olduğu performans alanlarında faaliyet göstermektedir.
- Modüler Özel Platformlar:OEM’ler, ölçeklenebilir aile platformları arasından seçim yapabilirler; bu platformlar, özelleştirilebilir eğim, sargı ve mıknatıslarla standart çekirdek boyutuna sahiptir ve modüler performans sunarken genel maliyeti düşürür.
- Akıllı Motor Servisi:Gömülü teşhis sistemleri, ağ bağlantısı ve performans verileri, abonelik tabanlı şirketlere motor servisi veya durum bazlı bakım hizmeti sunma fırsatları yaratmaktadır.